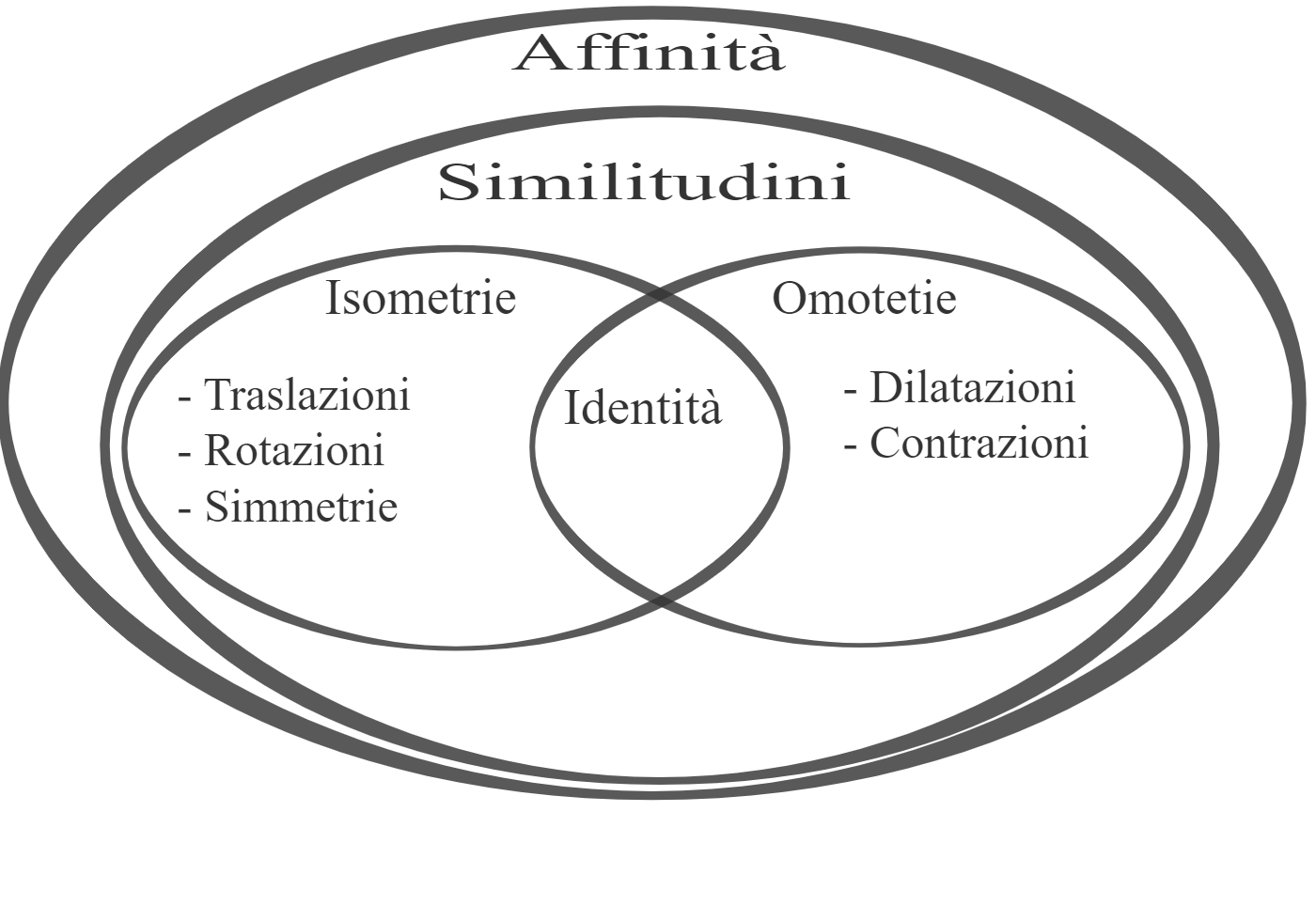
Classificazione `uarr`
Una trasformazione geometrica `cc(T)` tra i punti di un piano è una corrispondenza biunivoca che ad ogni punto `P` del piano associa uno e un solo punto `P^'` appartenente al piano stesso e viceversa.
`P^' = cc{T}(P)` è detto trasformato o immagine di `P` .
`P` è detto antitrasformato o controimmagine di `P^'` .
Fissato un sistema di riferimento (cartesiano ortogonale), le coordinate del punto `P^'(x^';y^')` possono essere espresse in funzione delle coordinate del punto `P(x;y)` :
`{(x^'=f(x,y)),(y^'=g(x,y)):}`
Queste equazioni rappresentano l'espressione analitica della trasformazione e forniscono le coordinate del punto trasformato `P^'` quando sono assegnate le coordinate del punto `P` .
Affinché la legge di trasformazione sia ben definita, occorre che le funzioni `f` e `g` siano ovunque definite, e invertibili. Dal punto di vista algebrico esse dovranno soddisfare le seguenti condizioni:
Un punto si dice unito rispetto alla trasformazione `cc(T)` se la sua immagine `P^'` coincide con `P`.
Operativamente per determinare i punti uniti di una data trasformazione basta esprimere la condizione in termini di coordinate:
`P -= P^' => {(x^'=x),(y^'=y):} => {(f(x,y) = x),(g(x,y) = y):}`
È bene ricordare che un sistema di equazioni può essere:
- determinato, in tal caso si avrà un numero finito di punti uniti;
- indeterminato, a cui corrisponderanno un numero infinito di punti uniti;
- impossibile, e non si avranno punti uniti.
Si dice unita una figura che nella trasformazione corrisponde a se stessa.
Le figure unite non sempre sono costituite da punti uniti; per esempio in una simmetria assiale le rette perpendicolari all'asse di simmetria sono unite, ma non costituite da punti uniti.
Un'affinità (o trasformazione affine) fra due piani `pi` e `pi^'` è un'applicazione biiettiva `cc(T)` che fa corrispondere al punto `P(x;y)` il punto `P^'(x^';y^')` secondo la formula:
`{(x^'= ax+by+e),(y^'= cx+dy+f):}`
dove i coefficienti `a, b, c, d, e, f` sono numeri reali.
L'applicazione è biiettiva (quindi invertibile) se `ad - bc !=0` .
L'applicazione `cc(T)` può essere scritta anche sotto forma di prodotto fra matrici:
`((x^'),(y^')) = ((a,b),(c,d)) * ((x),(y)) + ((e),(f))`
sotto l'ipotesi che `detA !=0`, dove la matrice `A = ((a,b),(c,d))` è la matrice dell'affinità.
Si ha un'affinità regolare se `detA !=0`.
In particolare si dice diretta se `detA >0`, inversa se `detA <0`.
La condizione `detA = ad-bc !=0` equivale a richiedere l'invertibilità della trasformazione che, come è noto dalla definizione, è una corrispondenza biunivoca dei punti del piano.
Si può dimostrare che un'affinità gode delle seguenti proprietà:
In generale un'affinità:
Una similitudine è una trasformazione geometrica affine in cui resta invariato il rapporto fra le distanze di coppie di punti corrispondenti `(A,B)` e `(A^',B^')` ovvero: `bar(AB)/bar(A^'B^')=k`.
Dal punto di vista analitico una similitudine è un tipo particolare di affinità in cui risulti: `a=d` e `c=-b` oppure `a=-d` e `c=b` (coefficienti diagonali opposti).
Perciò una similitudine può essere rappresentata in due soli modi:
`{(x^'= ax+by+e),(y^'= -bx+ay+f):}` similitudini dirette `detA >0`,
oppure `{(x^'= ax+by+e),(y^'= bx-ay+f):}` similitudini inverse `detA <0`.
Il numero `k` positivo definito da `k=sqrt(a^2+b^2)` si dice rapporto di similitudine.
Si può dimostrare che una similitudine gode delle seguenti proprietà:
Si dice isometria una trasformazione geometrica affine che conserva le distanze.
Dati due punti `A`, `B` l'isometria fa ad essi corrispondere due punti `A^'` e `B^'` tali che `bar(AB) = bar(A^'B^')`.
Pertanto le figure trasformate conservano la forma e la grandezza e dunque risultano congruenti a quelle date.
Sono isometrie le:
Traslazione di vettore `vec v (x_0,y_0)` è una trasformazione che ad ogni punto `P` del piano associa un punto `P^'` tale che il vettore `vec(PP^')` è uguale al vettore `vec v`.
Se `(x_0,y_0)` sono le componenti del vettore `vec v` l'espressione analitica della traslazione è data da: `{(x^'= x+x_0),(y^'= y+y_0):}`. La matrice della trasformazione è la matrice identità.
Si può dimostrare che una traslazione gode delle seguenti proprietà:
La rotazione di centro `C` e angolo `alpha` è la trasformazione che ad ogni punto `P` del piano associa un punto `P^'` tale che `bar(PC) = bar(P^'C^')` e l'angolo `hat(PCP^') = alpha` .
Le equazioni analitiche di una rotazione di angolo `alpha` in senso antiorario sono:
`{(x^'= x cos alpha - y sin alpha),(y^'= x sin alpha + y cos alpha):}`
La matrice della trasformazione è `A = ((cos alpha,-sin alpha),(sin alpha ,cos alpha))` dove `det A = cos^2 alpha + sin^2 alpha = 1`.
Si può dimostrare che per una rotazione valgono le seguenti proprietà:
La simmetria centrale di centro `C` è una trasformazione che ad ogni punto `P` del piano associa un punto `P^'` tale che `C` è il punto medio del segmento `bar(PP^')`.
Considerando la proprietà delle coordinate del punto medio, possiamo dedurre dalla definizione le equazioni della trasformazione: `{(x^' = 2x_C - x),(y^' = 2y_C - y):}`
o anche le equazioni della trasformazione inversa: `{(x = 2x_C - x^'),(y = 2y_C - y^'):}`.
Com'è evidente la trasformazione e la sua inversa sono formalmente identiche salvo lo scambio apice `harr` non apice, trattandosi di una trasformazione involutoria.
Si può dimostrare che una simmetria centrale gode delle seguenti proprietà:
La simmetria assiale di asse `ax + by + c =0`: è una trasformazione che ad ogni punto `P` del piano associa un punto `P^'` tale che il segmento `bar(PP^')` è perpendicolare all'asse e il punto medio `M` di `bar(PP^')` appartiene all'asse.
Esprimendo le condizioni imposte dalla definizione nei termini delle coordinate, possiamo dedurre immediatamente le equazioni della trasformazione:
`{(bar(PP^') _|_ ax + by + c = 0 ),(M_(PP^') in ax + by + c = 0 ):} => {(m_(PP^') = - 1/(m_(asse)) ),(a (x+x^')/2 + b (y+y^')/2 + c =0 ):}`.
Per scrivere le equazioni della trasformazione in forma esplicita si dovrà risolvere il sistema rispetto a `x^'` e `y^'`. Per il calcolo dei casi più semplici si consiglia di utilizzare il metodo di sostituzione, altrimenti è preferibile il metodo di Cramer.
Dal punto di vista analitico le equazioni di una simmetria assiale sono del tipo:
`{(x^' = alpha x + beta y + gamma),(y^' = beta x - alpha y + delta):}` , con `alpha^2 + beta^2 = 1`.
In particolare se l'asse passa per l'origine i termini noti si annullano.
Si può dimostrare che una simmetria assiale gode delle seguenti proprietà:
Nel caso di assi di simmetria particolari (assi cartesiani, rette parallele agli assi cartesiani o bisettrici dei quadranti) non è necessario ricorrere alla definizione per ottenere le equazioni della simmetria assiale, ma è sufficiente visualizzare graficamente la situazione per ottenere i risultati riportati nella seguente tabella:
Rispetto all’asse delle ascisse (`y = 0`)
`{(x^' = x),(y^' = -y):}`
Rispetto all’asse delle ordinate (`x = 0`)
`{(x^' = -x),(y^' = y):}`
Rispetto ad una retta parallela all’asse delle ascisse (`y = k`)
`{(x^' = x),(y^' = -y + 2k):}`
Rispetto ad una retta parallela all’asse delle ordinate (`x = h`)
`{(x^' = -x + 2h),(y^' = y):}`
Rispetto alla bisettrice I, III quadrante (`y = x`)
`{(x^' = y),(y^' = x):}`
Rispetto alla bisettrice II, IV quadrante (`y = -x`)
`{(x^' = -y),(y^' = -x):}`
Vedi anche: